Diffusion Models
Diffusion Models は、data に少しずつ noise を加えていく forward process と、その noise を少しずつ取り除いて data を生成する reverse process からなる generative model です。
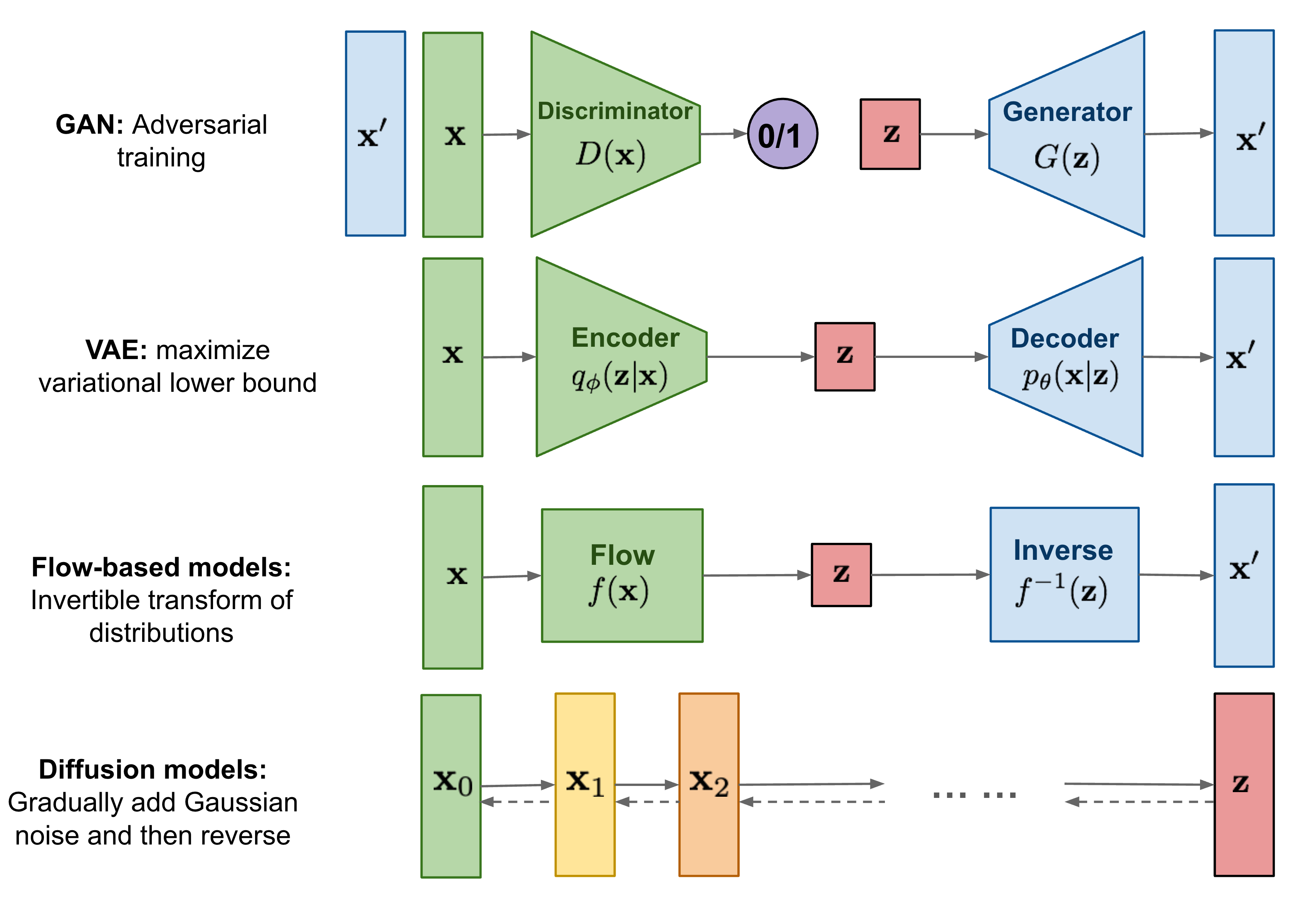
画像出典: Lilian Weng, “What are Diffusion Models?”。VAE、GAN、Flow-based model、Diffusion Model などの generative model の位置づけが示されています。
基本 idea
Diffusion Model では、まず clean data に対して、少しずつ Gaussian noise を加えていきます。十分な step を経ると、data はほぼ standard Gaussian noise になります。
次に、model はこの process を逆向きにたどります。つまり、noise から始めて、少しずつ denoise しながら data sample を生成します。
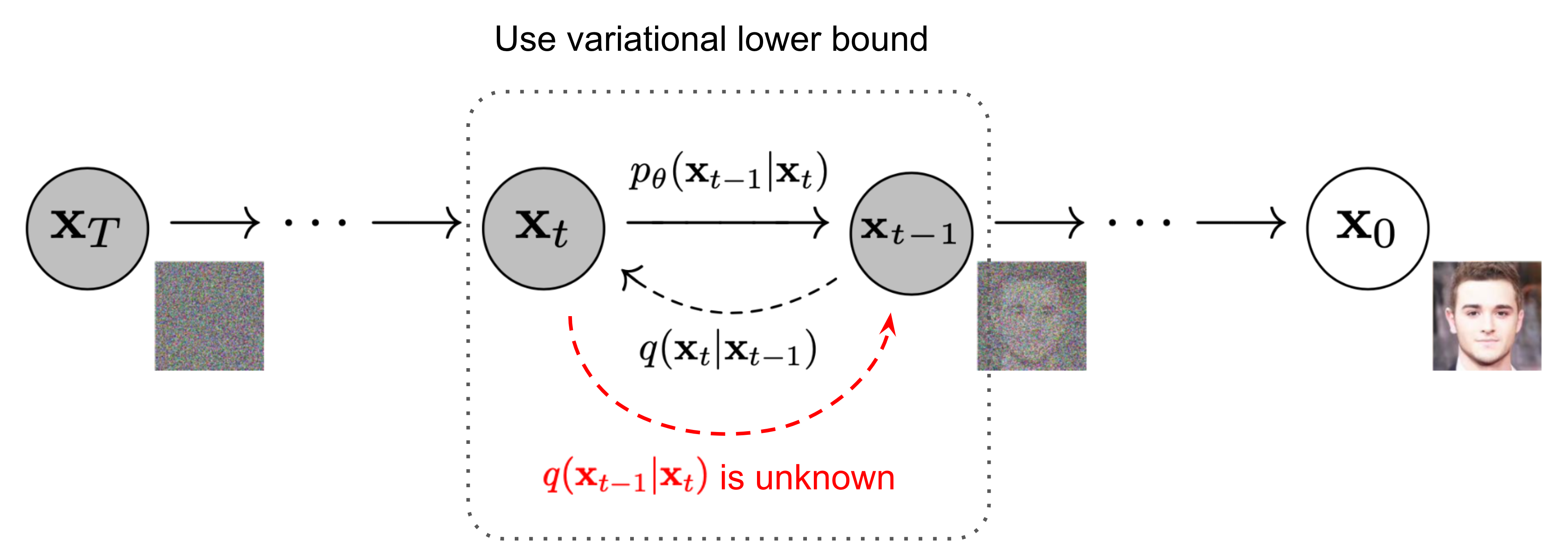
画像出典: Lilian Weng, “What are Diffusion Models?”。Forward diffusion process と reverse denoising process が示されています。
代表的な model: DDPM
DDPM、つまり Denoising Diffusion Probabilistic Model は、diffusion model の代表的な定式化です。DDPM では、forward process は固定された Markov chain として定義され、reverse process は neural network によって学習されます。
Sampling の直感
Sampling では、pure noise から開始します。
そして、reverse process を通じて次第に noise を取り除きます。
最終的に、 が生成された sample になります。
画像出典: Lilian Weng, “What are Diffusion Models?”。Noise から画像が段階的に生成される様子が示されています。
数式で見る diffusion の二つの Markov chain
DDPM では、forward process は固定された Markov chain として定義されます。
各 step では、少しだけ Gaussian noise を加えます。
ここで、 は noise schedule です。この式の気持ちは、「clean data を少しずつ壊して、最終的にはほぼ Gaussian noise にする」ということです。
Reverse process は、model parameter を使って次のように学習されます。
この式の気持ちは、「noise から一気に画像を作るのではなく、各時刻で一段階だけ denoise する条件付き分布を学ぶ」というものです。Diffusion model の安定性は、この難しい生成問題を多数の小さな denoising 問題へ分解している点にあります。