Reverse Diffusion Process
Reverse diffusion process は、noise から data を生成する process です。Forward process が に noise を加えて に向かうのに対して、reverse process は から へ戻ります。
Learned reverse transition
DDPM では、reverse process を次の Gaussian transition として parameterize します。
Neural network は、各時刻 において、どのように から noise を取り除いて を得るかを学習します。
Denoising の見方
Reverse process は、step ごとの denoising として理解できます。各 step では、現在の noisy sample から、少しだけ clean な sample を予測します。
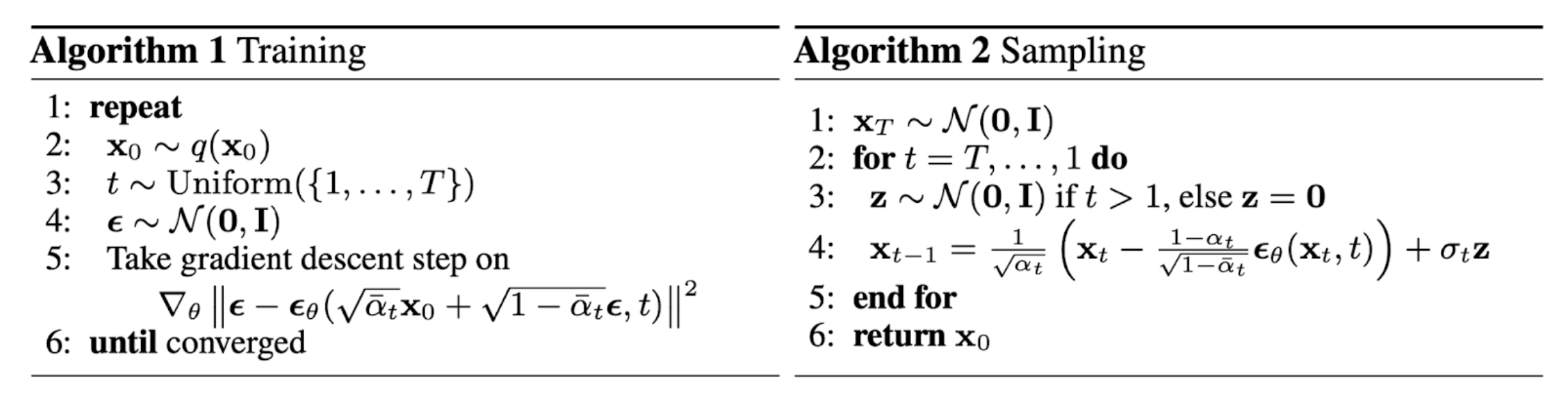
画像出典: Lilian Weng, “What are Diffusion Models?”。DDPM の training と sampling の algorithm が示されています。
なぜ step が多いのか
一度に pure noise から clean data を生成するのは難しいため、Diffusion Model は多くの小さな denoising step に分解します。この分解によって、各 step の問題は比較的単純になります。一方で、sampling には多くの step が必要になるため、速度が課題になります。